Implementation notes¶
64 channels is a very generous portion of the spectrum for this game. A single channel could in theory accomodate 10 players with very little interferrence.
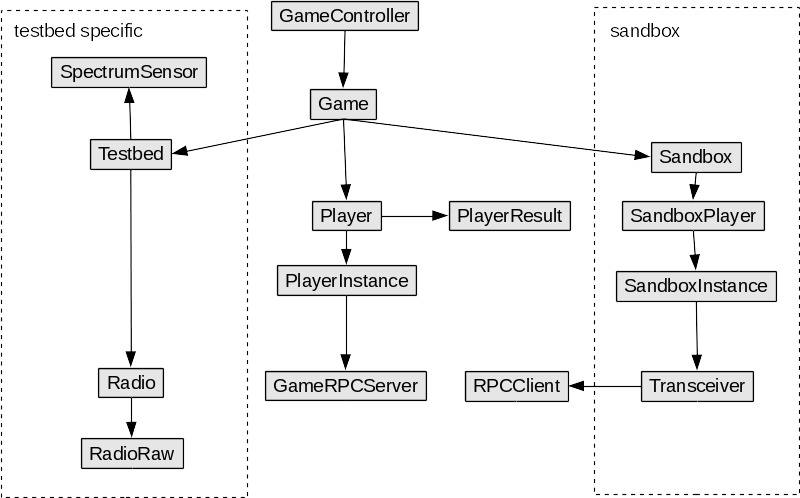
Currently,
spectrumwars_runnerruns player’s code in a separate processes (provided byspectrumwars_sandboxexecutable). The processes communicate through ZeroMQ JSON RPC. This provides some isolation between players and the game controller. It prevents simple ways of cheating that would be possible if code would share the same Python interpreter. It also gracefully handles infinite loops and most accidental errors.This is not, however, robust against more sophisticated malicious code. There is currently nothing preventing one user from accessing the RPC interface inteded for another user. There is also nothing preventing player’s code from accessing the network, filesystem or consuming excessive amounts of memory. These limitations must be implemented on the operating system level and current code makes no attempt to implement them.
In the future, more sophisticated sandbox methods might be implemented (e.g. running player’s code in a virtual host). Since all communication between player’s code in
Transceiverclass and the game controller already occurs over RPC, this should not require further modifications to the game controller.Using sensor nodes connected directly over USB (instead of using serial-to-USB converters) greatly simplifies the setup - apart from a powered USB hub, there is no need for having a converter plus a separate power supply for each node.
However, USB CDC implementation on VESNA is still prone to occasional data loss. This is visible as errors in communication between the game controller and the radio (e.g.
RadioTimeoutexceptions or truncated packet payload). At the moment this is rare enough for direct USB connection to be considered usable in practice.I believe that in the final user interface for this game, it is crucial that both console log of the running game and the visualized timeline are presented to each player. Without this kind of feedback it is very hard to develop a working algorith.
There is no concept of radio power usage, battery level, etc. as discussed in the original design document. I believe these are unnecessary complications and in any case would only be simulated since radios always run on external power. If the aim is to encourage players to conserve power, this can be achieved with appropriate scoring function (e.g. give negative score for excessive number of transmitted packets or high transmission power)
There is no scoring function defined at the moment.
There is no backchannel communication between the player’s classes implemented. I believe this is an unnecessary complication and current experience shows that it is quite simple to use data in the packet to communicate between the nodes. This is also a more realistic scenario.