Firmware interface¶
In VESNA implementation of the SpectrumWars game, one or more sensor nodes are connected to the game controller (e.g. a Linux running computer) over the USB.
USB carries a simulated serial line. Normally, the SpectrumWars firmware uses
VESNA’s mini-USB interface to expose a standard USB CDC endpoint identified by
product string “VESNA SpectrumWars radio” (Linux typically associates a device file named
/dev/ttyACMx with these endpoints).
Alternatively, a setting in vsndriversconf.h allows compilation of
firmware that uses RS-232 serial line instead of USB CDC. In this case, the
firmware’s interface is exposed on VESNA’s USART1 connector (115200 baud, 8
data bits, 1 stop bit, no parity). A serial-to-USB converter can be used to
connect such a node to the game controller. Serial-to-USB converters are
usually associated with /dev/ttyUSBx device files on Linux.
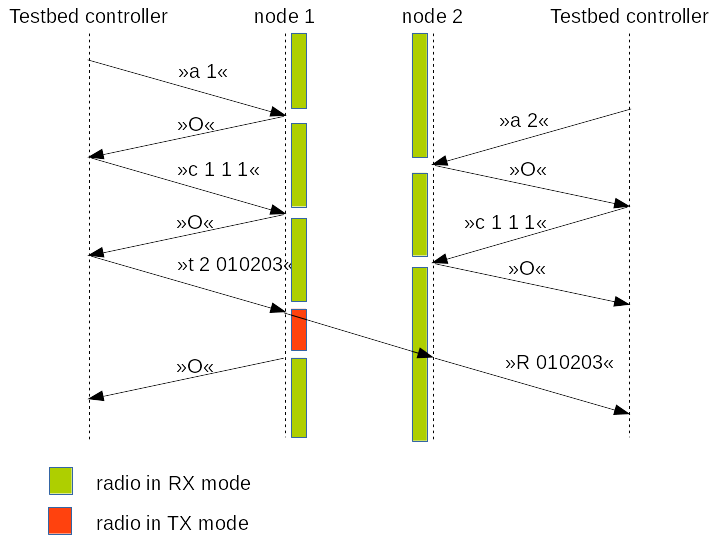
The testbed controller controls the sensor node using a terse, ASCII base protocol. Commands are kept short to keep the protocol reasonably fast even when used over a relatively slow serial line. ASCII has been chosen over a binary protocol to aid in debugging (i.e. the node can be controlled manually using a standard serial terminal for development and debugging purposes)
Protocol consists of atomic messages: commands (sent from the controller to the node) and responses (sent from the node to the controller). Each message starts with a unique ASCII alphabet character denoting the type of the message, has optional space separated parameters and ends with ASCII line feed character (“\n”).
Following commands can be sent from the controller to the node:
- a <address>
- Set the radio address. <address> is a hexadecimal integer in the range 0-255 containing the MAC address. Node will only receive packets addressed at the configured MAC address and will silently ignore others.
- c <chan> <bw> <power>
Set the radio channel, bandwidth and power. Parameters are hexadecimal integers with the following meanigs:
<chan> radio frequency channel to tune to. Valid channels are from 0 to 255. Central frequency is calculated using the following formula:
f = 2400.0 MHz + <chan> * 0.1 MHz
<bw> channel bandwidth setting to use, starting with 0. This setting affects the channel filter and modem bitrate according to the following table:
<bw> bitrate [kbps] channel filter [kHz] 0 50 100 1 100 200 2 200 400 3 400 800 <power> power amplifier setting to use, starting with 0. This setting affects the transmission power according to the following table:
<power> transmit power [dBm] 0 0 1 -2 2 -4 3 -6 4 -8 5 -10 6 -12 7 -14 8 -16 9 -18 10 -20 11 -22 12 -24 13 -26 14 -28 15 -30 16 < -55 Regardless of the settings, minimum-shift keying modulation is used.
- t <address> <data>
Transmit a packet using the previously set radio parameters.
<address> is a hexadecimal integer in the range 0-255 containing the MAC address of the recipient.
<data> is a hexadecimal string containing the data to be transmitted in the packet. Two hexadecimal digits per byte. The length of the string can be between 1 and 252 bytes.
For example, sending packet with ASCII content “hello” to address 1:
t 01 68656c6c6f
Node can respond with the following responses:
- O
- Last command was successfully executed.
- E <message>
- Last command resulted in error. <message> is an ASCII string describing the error.
- R <data>
Node received a packet. <data> is a hexadecimal string containing the data in the packet.
Radio does CRC checking in hardware and silently drops corrupted packets. Hence it is very likely that the <data> string is identical to the one passed to the corresponding t command.
Any messages not conforming to this response format should be ignored by the
controller. In practice, nodes can emit additional debugging information over
this channel (see settings in vsndriversconf.h)
By default, the node’s radio is kept in receive mode. Receive mode is temporarily turned off during reconfiguration. After receiving a transmit command, the node switches the radio to transmit mode, transmits the single packet and switches back to receive mode.